
The team has more than ten years of research foundation in the field of surgical navigation and robotics, and the technology platform is mature, which is convenient for secondary development
The puncture surgery robot software is developed based on core technologies such as image processing, surgical navigation, robot flexible control and respiratory follow-up, in which doctors carry out surgical path planning before surgery. In combination with AimPosition optical positioning system, robotic arm and customized optical positioning tools, the puncture path can be calculated and navigated in real time to assist doctors in completing various puncture surgeries. It can be used in liver and lung biopsy and other surgical scenarios.
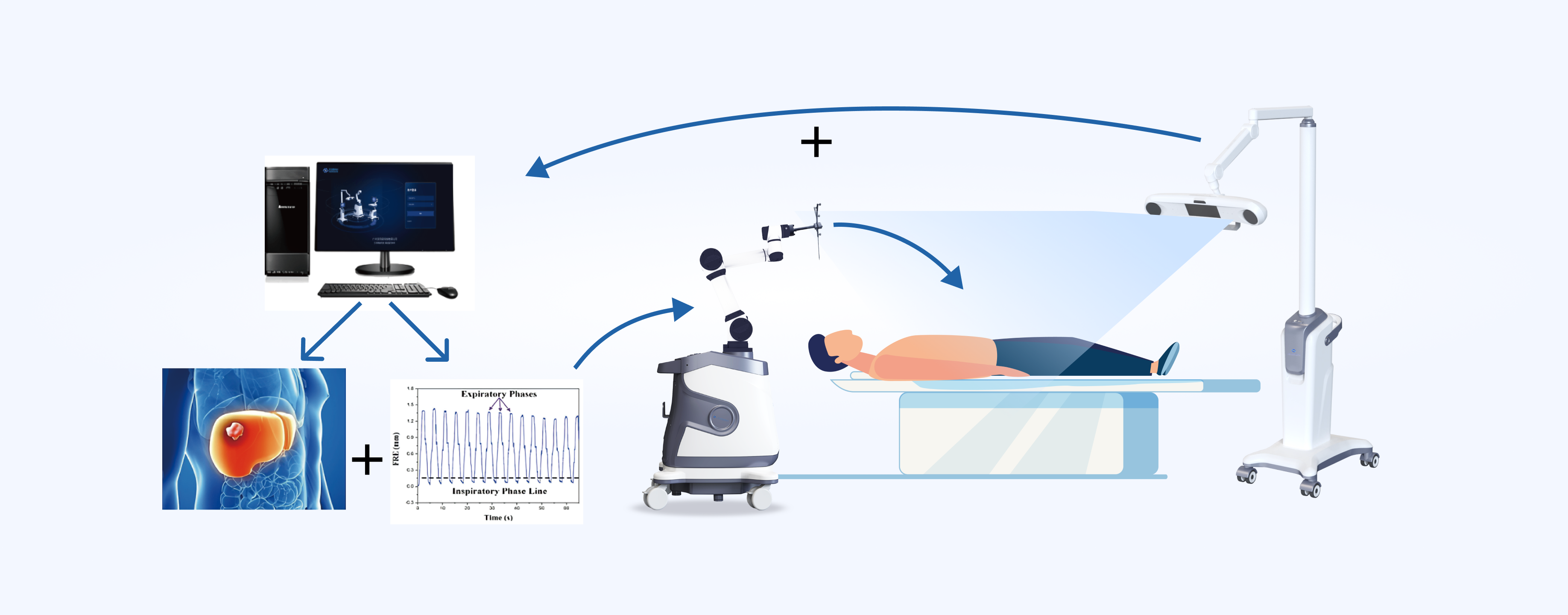
· AimPosition tracks the marked points on the breathing movement model in real time;
· Before surgery, the doctor planned the surgical path on the software;
· Through the registration of the model and CT images, optical breath gating is realized, and the robot is controlled to perform puncture in the time slot with the smallest error;
· Computed pose information of the robotic arm through real-time puncture path, positioned and compensated viscera deformation and displacement in real time under the influence of breathing movement, and realized accurate puncture surgery.




Tel:020-31800906
Email:lict@aimooe.com
Address:30-6, Kaitai Road, Huangpu District, Guangzhou, China
Taobao Mall:Guangzhou Aimooe Technology Co., Ltd.